Depuis plusieurs années, différents EPI ont été proposés à des élèves de 3e autour de cet objet, en collaboration selon les années avec des professeurs d’EPS, de physique et de SVT.
La maquette a évolué en fonction des apports des projets de l’année. Elle a parfois été laissée de coté quelques temps, au gré des impératifs (confinement par exemple) et des envies de changement des enseignants (nous ne travaillons pas tous les ans sur les mêmes sujets).
Qu’est-ce qu’un planeur sous-marin ?
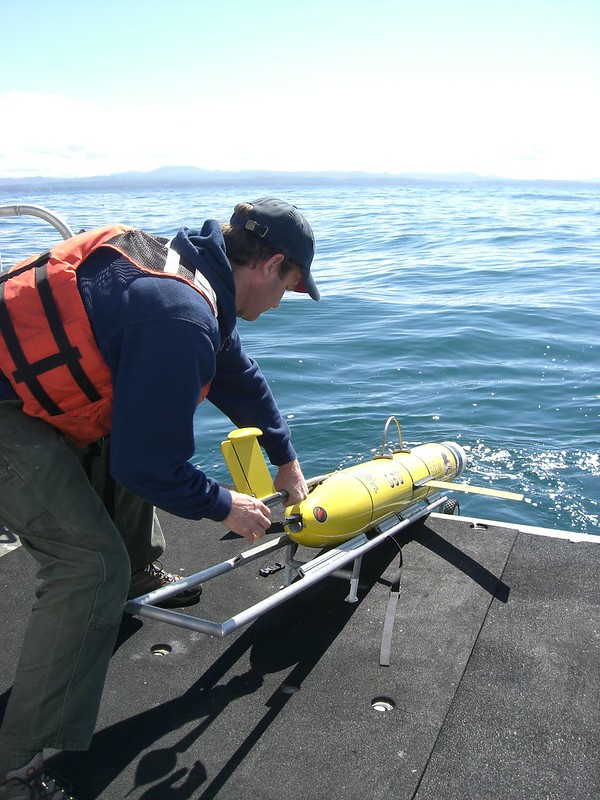
Lancement d’un planeur sous-marin - crédit Oregon State University
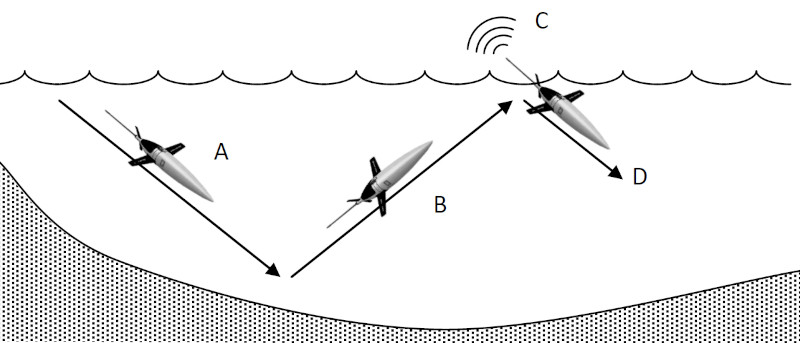
Un planeur sous-marin est un drone que se déplace sous l’eau sans hélice. Il est capable de monter et descendre sous l’eau comme n’importe quel sous-marin en faisant varier sa masse volumique. Le déplacement de masses à l’intérieur (ses batteries) permet de le faire "pencher" dans la direction souhaitée. Comme il est équipé d’ailes (la plupart du temps fixes), lorsqu’il monte ou descend ne le fait pas verticalement, mais il avance "en biais" (A, B, D ci-dessous). Ce mode de déplacement permet d’avoir plusieurs mois d’autonomie, pendant lesquels le drone peut prendre des mesures sous l’eau et les transmettre régulièrement à des scientifiques (C).
Modélisation, inspiration...
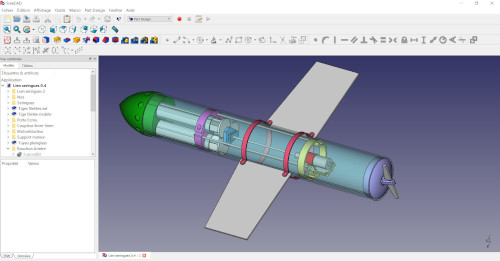
Au collège, nous dessinons beaucoup avec Sketchup. Ce logiciel a beaucoup de points forts, mais modifier une dimension d’un pièce sans la redessiner complètement est parfois difficile. Il fallait utiliser un logiciel paramétrique ; pour des raisons économiques FreeCad a été retenu et la 1ère étape a été de se former !
Quelques sources d’inspiration ont permis de s’assurer que le principe est viable, même s’il y avait besoin de simplifier pour une exploitation au niveau collège !
1ères versions et essais de principe avec le matériel du collège...
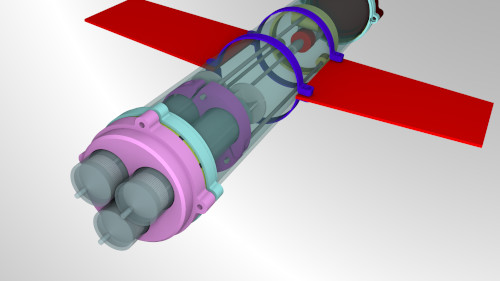
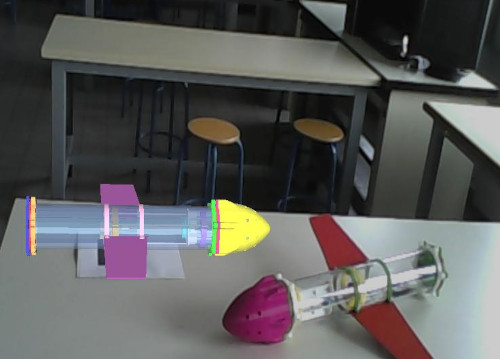
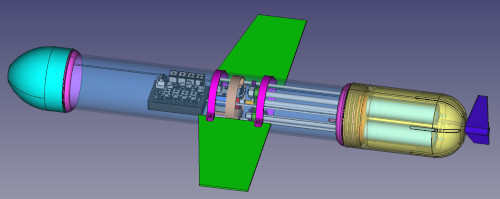
Les maquettes du collège sont construites autour de tuyaux en plexiglass de 9cm de diamètre et 50cm de long. 3 grosses seringues jouent le rôle de "ballast" : on peut les remplir ou les vider d’eau pour modifier la masse volumique de l’objet et le faire monter ou descendre dans l’eau.
Différentes versions ont été testées avant même de commencer à faire travailler les élèves pour résoudre des problèmes d’assemblage et d’étanchéité (qui n’est pas le fort des pièces imprimées en 3D).

Cette vidéo illustre les 1ers essais de remplissage des ballasts...
Cette vidéo illustre les 1ers essais d’utilisation de l’accéléromètre (pour connaître l’inclinaison du drone) avec scratch...
Les projets des élèves
Selon les années, les élèves se sont penchés sur des problématiques différentes...
Comment éviter les obstacles ?
Il s’agissait de travailler sur le principe du sonar, en utilisant notamment d’autres robots équipés de capteurs similaires.
Quelle masse ajouter dans le planeur - et comment ?
Pour que le planeur puisse monter ou descendre en faisant légèrement varier son volume, il doit au départ avoir la même masse volumique que l’eau... Il faut ajouter la bonne masse à l’objet, ce qui n’est pas si simple car il est assez léger au départ et parce qu’il y a des pièces en mouvement à l’intérieur.
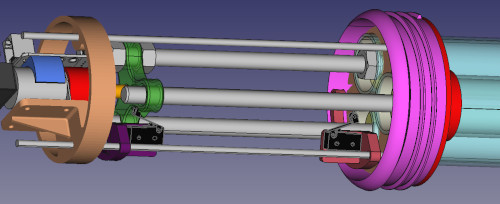
Comment implanter les capteurs de fin de course ?
Il faut pouvoir détecter lorsque les ballasts (seringues) sont pleins ou vides pour arrêter le moteur. La solution la plus simple (et fiable) est d’utiliser des capteurs de fin de course (microrupteurs), mais encore fallait-il leur trouver une place dans cet environnement contraint et concevoir leur support...
Comment utiliser le capteur "boussole" ?
En utilisant un robot "terrien", les élèves ont vérifié le fonctionnement de la boussole et sont parvenus à faire tenir un cap à leur robot.
Quelle forme pour les ailes ?
Les planeurs réels ont des ailes de formes assez différentes... Afin de trouver la meilleure forme possible, les élèves ont eu à disposition un corps de planeur miniature avec une partie coulissante pour faire varier son volume. Il restait à concevoir des ailes à l’échelle et à tester leur efficacité en aquarium !
Voici deux exemples de vidéos réalisées par des élèves testant le profil d’ailes qu’ils ont imprimé en 3D en descente et en montée :
Comment ajuster l’inclinaison du planeur sous l’eau ?
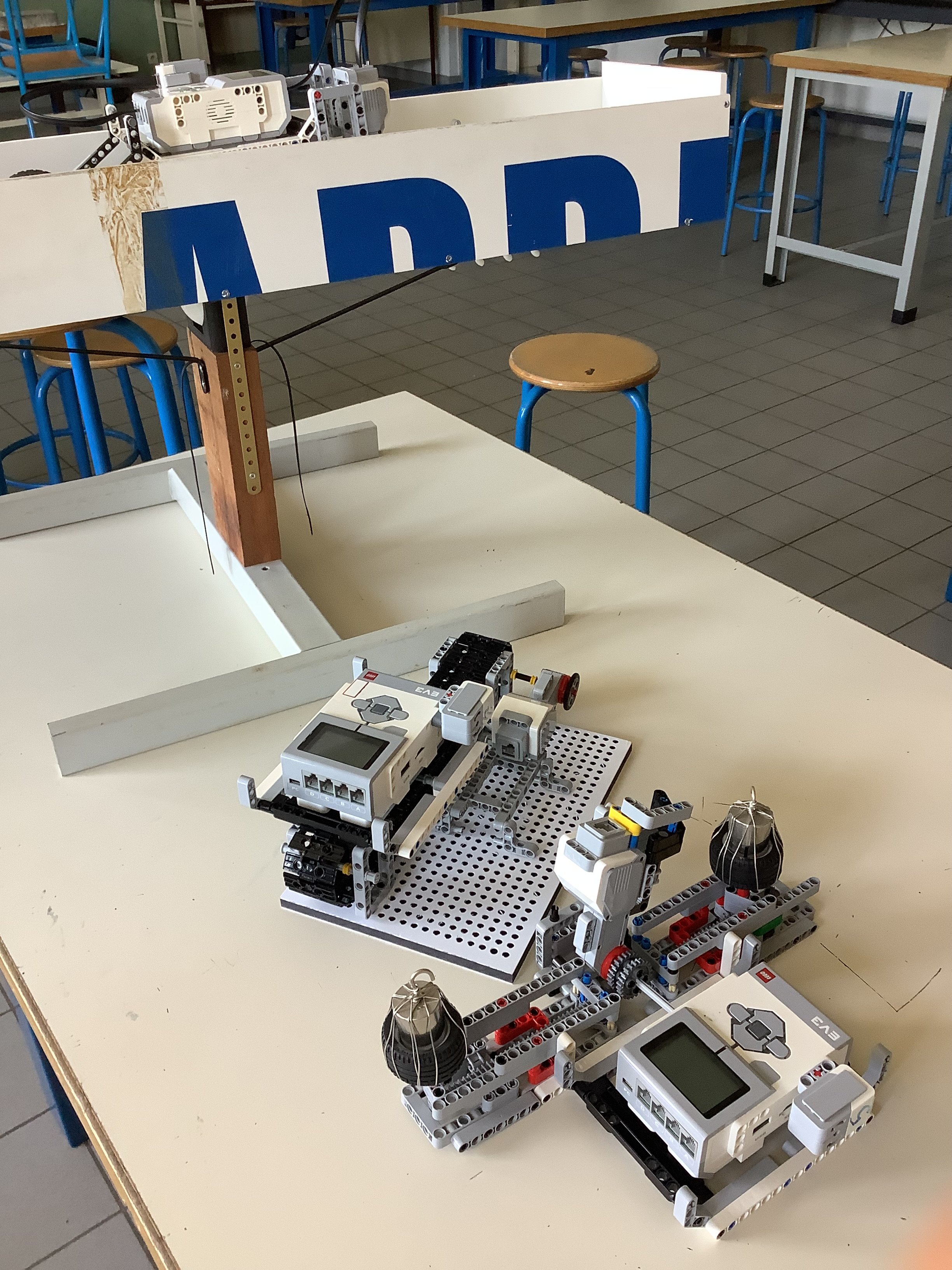
Un planeur doit pouvoir "lever" ou "baisser" plus ou moins le nez pour avancer lorsqu’il monte ou descend. En utilisant des Lego Mindstorms EV3, les élèves ont eu pour mission de construire des robots capables de déplacer une masse sur une certaine longueur en fonction de son inclinaison. Il s’agissait de vérifier la faisabilité d’un système de déplacement du centre de gravité, de réfléchir à meilleure structure pour le programme et à des solutions techniques pour le mécanisme qui reste à ce jour à adapter à notre maquette de planeur...
Voici quelques exemples de projets élèves de robots destinés à "contrôler" l’inclinaison d’un banc d’essai :